مواد این پست تجربیات چند سال کار در آزمایشگاه ماشین های الکتریکی دانشگاه و تدریس در مرکز آموزش شرکت الکتروژن می باشد. امیدوارم بتواند دیدگاه مناسبی از عملکرد موتور DC ارائه کند.
فهرست مطالب
- مقدمه
- ساختمان ماشينهاي DC
- اصول کار يک موتور DC
- روابط نيرو و گشتاور در موتورهاي DC
- حفاظت موتورهاي DC
- راه اندازي موتورهای DC
- تغيير جهت دوران در موتورهاي DC
- پديده کموتاسيون و مشکلات مرتبط با آن
- کنترل سرعت موتورهای DC
- انواع موتورهاي DC
- موتورهاي اونيورسال
مقدمه
- سيستمهاي توزيع برق DC در حال حاضر متداول نبوده و ژنراتورهاي DC نيز کاربرد بسيار کمي در صنعت دارند.
- موتورهاي DC به علت مزيت کنترل پذيري مطلوب آنها، هنوز کاربردهاي متنوعي در صنعت دارند.
- ماشين هاي DC عمدتا شبيه به ماشين هاي AC مي باشند چونکه ماهيت ولتاژ توليد شده در سيم پيچ ها AC است و در ماشین DC وجود يکسو کننده باعث می شود ولتاژ ماشين يکسو گردد و بدين ترتيب گشتاور در موتور DC و ولتاژ در ژنراتور DC يکسو مي گردد. اين مکانيزم کموتاتور نام دارد.
- عيب عمده ماشينهاي DC استفاده از کموتاتور و متعاقب آن فرسودگي، نياز به تعمير و نگهداري و ايجاد جرقه مي باشد .
- جايگاه ماشينهاي DC با تغيير و تحولات رخ داده در عرصه الکترونيک قدرت خدشه ديده و رفته رفته جايگاه خود را در زمينه کنترل دور و گشتاور به رقباي خود واگذار مي کند. اما تا چند سال پیش موتورهای DC در دستگاههای اتوماتیک و اتوماسیون صنعتی سلطه مطلق داشتند. مدل ریاضی ساده و بسیار خوش فهم ماشینهای DC کمک می کند که روشهای کنترلی به خوبی توسعه یابند و مقدمه ای برای ورود به بحث موتورهای القایی و سنکرون می باشد. و البته باید ذکر گردد که در کارخانه های مختلف هنوز هم موتورهای DC فراوانی مشغول به کار هستند. لذا بررسی و مطالعه این نوع از ماشین ها بسیار سودمند بوده و بینشی عمیق برای فهم روش های کنترل پیشرفته ایجاد می کند.
ویدئوی مربوط به ساختمان و نحوه عملکرد موتور DC
در زمینه ساختمان و نحوه عملکرد موتور DC یک ویدئوی زبان انگلیسی داریم که در موسسه موتور درایو ترجمه و به صورت حرفه ای ویرایش و زیرنویس شده است. (مدت زمان ویدئو 6 دقیقه و حجم آن در کیفیت 720P تقریبا 18 مگابایت می باشد) این ویدئوی جذاب را از دست ندهید.
ساختمان ماشین های DC

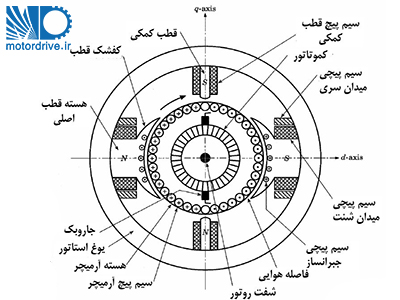
ماشینهای DC از سه قسمت عمده به صورت زیر تشکیل شده اند. ۱- استاتور ۲- روتور ۳ جاروبک و نگهدارنده در شکل زیر اجزای مختلف به صورت شماتیک آورده شده است.

۱- استاتور موتور DC
همان طور که ملاحظه می گردد سیم پیچ میدان که خود به دو سیم پیچ سری و شنت تقسیم بندی می گردد هسته آهنی و فریم موتور اجزای اصلی استاتور هستند در موتورهای بزرگتر قطب کمکی و سیم پیچی جبرانگر نیز به این اجزا افزوده می گردد.

۲- روتور موتور DC
روتور موتور DC که به عنوان آرمیچر نیز شناخته می شود در شکل مقابل آورده شده است. اجزای اصلی روتور هسته سیم پیچی و یاتاقانها هستند. روتور قسمت گردان ماشین DC است.

۳- مکانیزم های جاروبک و نگهدارنده جاروبک
جاروبک وظیفه انتقال جریان به کلکتور گردان را بر عهده دارد. جاروبک و کلکتور عامل یکسو کردن گشتاور در موتورهای الکتریکی DC هستند.

اصول عملکرد موتور DC
عبور جريان در يک هادي، در اطراف آن ميدان مغناطيسي ايجاد مي کند. اين موضوع در شکل (A) نشان داده شده است. هنگامي که هادي حامل جريان در يک ميدان مغناطيسي خارجي قرار مي گيرد. ميدان خارجي بر هادي حامل جريان نيرويي وارد مي کند که اين موضوع در شکل (B) نشان داده شده است.

با بررسی اشکال بالا می توان موارد زیر را استنتاج کرد.
- اگر يک هادي داخل ميدان مغناطيسي قرار داده شود
– حرکت هادي درون ميدان جريان الکتريکي توليد مي کند (ژنراتور) – عبور جريان الکتريکي درون هادي توليد نيروي محرک ميکند ( موتور)
- بيان معکوس قضيه فوق به اين صورت است که: يک موتور DC مي تواند به عنوان ژنراتور مورد استفاده قرار گيرد.
– گرچه ماشيني که به منظور موتور بودن طراحي شده است براي کارکرد موتوري بهينه تر مي باشد.
روابط نیرو و گشتاور در موتور DC

در روابط فوق F نیروی تولید شده، i جریان عبوری از هادی، l طول هادی تحت تاثیر میدان، B چگالی شار، r شعاع گردش هادی و T (تاو) گشتاور تولید شده است. در رابطه فوق q زاويه بين F و r است. بنابراين هنگامي که حلقه سيم در خارج از محدوده ميدان مغناطيسي قرار مي گيرد گشتاور صفر مي شود. نیروی وارد بر قطعات مختلف هادی در میدان الکتریکی به صورت زیر محاسبه می گردد.

گشتاور در تمامي موتورهاي واقعي از سه عامل زير تبعيت مي کند. ۱- شار داخل ماشين ۲- جريان ماشين ۳- يک عدد ثابت به نمايندگي از ساختار ماشين
T=K*φ*Ia
به طریق مشابه می توان رابط نیروی محرکه داخلی ماشین را بصورت زیر استخراج کرد.
Ea=K*φ*ω
در رابطه فوق Ea نیروی محرکه موتور، K یک ضریب ثابت، φ شار موتور و ω سرعت زاویه ای بر حسب رادیان بر ثانیه است. از طریق همین دو رابطه و مدار معادل هر موتور می توان تحلیل های اساسی خیلی جالبی زد .
حفاظت موتور در مقابل جريان زياد راه اندازي
الف: با وارد کردن مقاومت در مسير آرميچر
ب- با کاهش ولتاژ ترمينال در هنگام راه اندازي
الف: کنترل جريان راه اندازي با مقاومت راه انداز
در هنگام راه اندازي، موتور نمي چرخد، پس ω=۰ بوده و از اينرو طبق روابط پیشین نيروي محرکه داخلي موتور EA = 0V مي شود. و از طرف ديگر مقاومت داخلي معمولي موتور DC بسيار کم است (۳-۶ درصد پريونيت) ، که موجب می شود جريان بسيار زيادي در موتور برقرار گردد. براي مثال، یک موتور DC، از نوع تحریک مستقل (انواع موتورهای DC در مقاله جداگانه ای تشریح شده است) با ولتاژ ۲۵۰ ولت، توان ۵۰HP و مقاومت آرميچر Ra=0.06 اهم جريان بار کامل ۲۰۰ امپر دارد، در اين حالت جريان راه اندازي برابر است با:

این جريان در حدود ۲۰ برابر جريان نامي موتور مي باشد و احتمالا خسارت بسيار جدي به آن وارد مي کند. يک راه حل براي مشکل جريان راه اندازي وارد کردن مقاومت راه انداز در مسير آرميچر براي محدود کردن جريان ميباشد تا هنگامي که EA بتواند ايجاد گردد . البته اين مقاومت ميبايست با افزايش نيروي محرکه داخلي موتور از مدار خارج شود در غير اين صورت اين مقاومت باعٍث تلفات گرديده و مشخصه گشتاور سرعت موتور را مختل خواهد کرد. کنترل جریان راه اندازی یک مدار نمونه برای راه اندازی مقاومتی موتور DC در شکل زیر آورده شده است.

مقاومت راه اندازی که به صورت سری با مدار آرمیچر متصل شده است به سه قسمت جدا از هم تقسیم شده است و با Rstart نشان داده شده است. تیغه های باز بسته شونده رله یا کنتاکتور نیز با ۱A ، ۲A ، ۳A نشان داده شده اند. در لحظه راه اندازی هر سه تیغه رله باز هستند و کل مقاومت راه اندازی در مدار است و جریان راه اندازی محدود می شود با دور گرفتن موتور و افزایش نیروی محرکه القایی EA به ترتیب تیغه رله ها عمل کرده و در هر مرحله قسمتی از مقاومت راه اندازی را اتصال کوتاه می کند و پس از چند ثانیه کل مقاومتها از مدار خارج شده و بای پس می شوند.

ب- کنترل جريان راه اندازي با کاهش ولتاژ ترمينال در هنگام راه اندازي
با زدن یک KVL ساده می توان به رابطه زیر برای محاسبه جریان آرمیچر رسید.
Ia=(Vt-Ea)/Ra
در هنگام راه اندازی نیروی محرکه موتور EA=0 است. پس رابطه به صورت زیر خلاصه می شود.
Ia=Vt/Ra
برای کنترل جریان راه اندازی در هنگام راه اندازي مي توان ولتاژ موتور را بتدريج افزايش داد تا جريان آرميچر محدود گردد اين کاري است که در درايوها و سافت استارترها انجام مي شود.
57 دیدگاه ها
سلام میشه در مورد ساختار DUAL WINDING MOTOR مطالب بزارید
سلام وحید جان
اگر منظور شما را خوب متوجه شده باشم. موتور دو سیم پیچه معمولا در مورد موتورهای القایی با چند سیم پیچ مصداق پیدا می کند سرعت موتور در موتورهای القایی نسبت عکس با تعداد قطب دارد برای داشتن سرعتهای مختلف دو سیم پیچی مثلا یکی شش قطب و دیگری چهار قطب (در موتورهای کولر) سیم پیچی می کنند و شما با کلید می توانید دو دور مختلف از موتور در اختیار داشته باشید. موتورهای دو دور آسانسور نیز به همین صورت می باشند دور تند چهار قطب و دور کند 16 قطب هستند.
با سلام و عرض احترام بعلت معیوب شدن یکی از موتورهای DCخط تولیدمون موتور دیگه ای رو که تقریبا مشابه اون بود جایگزین کردیم. این موتور دو تا ولتاژ فیلد داره.185 و 310 ولت.جریان کاری موتور 1150 آمپره و ولتاژ آرمیچرش 500 ولت. rpm پلاک 10-995 و 995-1140 ثبت شده. دور کاری ما 500 دوره با ولتاژ آرمیچر 300 ولت. ولتاژ تغذیه فیلدمون که الان به موتور میدیم 205 ولته. سوالی که از حضورتون دارم اینه که افزایش ولتاژ فیلد به 310 ولت به کم شدن فشار روی آرمیچر کمک میکنه یا اینکه نتیجه عکس میده؟ با تشکر فراوان
سلام مهیار جان
من باید پلاک را ببینم تا مطمئن شوم که شما مجاز به اعمال ولتاژ بیشتر می باشید یا خیر؟ به فرض اینکه شما مجا به انجام این کار باشید. می دانیم که در صورت افزایش ولتاژ تحریک (فیلد) جریان آن نیز افزایش یلفته و باعث افزایش شار می شود. با افزایش شار مطابق رابطه نیروی ضد محرکه القایی در مرحله نخست ثابت می ماند مطابق رابطه شما یک پارامتر در سمت دیگر رابطه EA را افزایش داده اید لذا سرعت کم می شود. در این حالت جریان آرمیچر نیز کاهش خواهد یافت اول اینکه سرعت کم شده و توان تحویلی به بار کاهش یافته و دیگر اینکه در گشتاور ثابت هم با افزایش شار جریان آرمیچر کاهش خواهد یافت (رابطه گشتاور را ببینید). برای ثابت نگهداشتن دور موتور مجبور خواهید بود ولتاژ ترمینال آرمیچر را افزایش دهید. کلا یک سری از حالتهای گذرا به وجود می آید که باید تحلیل شود.
سلام….خیلی خوب بود ممنون ازتون… موفق باشید..
سلام میثم جان
ممنون از لطفی که به ما دارید.
در موتورهای dc در حالت بی باری دور موتور لحظه لحظه افزایش می یابد.چرا؟
سلام بهمن جان
با توجه به منحنی های گشتاور-سرعت در دو حالت سرعت بی باری موتور زیاد است. اول اینکه موتور دارای خودتحریک سری باشد که این موتورها نباید بی بار راه اندازی شوند. و مورد دیگر اینکه موتور شنت باشد اما تحریک آن قطع شده باشد که باعث خواهد شد سرعت به سمت بی نهایت شدن و آسیب به موتور پیش برود.
سلام مهندس در مورد ولتاژ فیلد میخواستم اطلاعات بگیرم
سلام فرهاد جان
در موتورهای تحریک موازی مساوی ولتاژ شبکه است. و در موتورهای تحریم مستقل نیز به صورت مستقل کنترل می شود و به نظر طراحی الکتروموتور بستگی دارد.
درود فراوان بر شما استاد گرامی بنده جهت مونتاژ درایو dc از بردهایی استفاده میکنم،که آنچنان حفاظت خوبی برای تریستورها و یا حفاظت فیلد ندارند.شما چه چیزی پیشنهاد میکنید..با تشکر
سلام مجید جان
خیلی ممنون از لطفی که به بنده دارید من در پروژه خودم از فیوزهای نیمه هادی استفاده کرده بودم.
با سلام یک موتور DC هنگام راه اندازی یک جریان معکوس به ما میده و بعد آزاد کردن ترمزهای درام متصل جریان معکوس حذف شده میشه علت این قضیه رو توضیح بدین با تشکر
سلام جناب قوامی
خیلی متوجه نشدم که منظور شما چیست. لطفا در صورت نیاز با بنده تماس بگیرید.
سلام آیا باید هم روتور و هم استاتور در موتور الکتریکی به برق وصل باشن؟ تشکر
سلام امید عزیز
در موتورهای DC که سیم پیچ میدان دارند بله باید هر دو بصورت یک پیکربندی (سری، موازی، کمپوند یا تحریم مستقل) به برق متصل شوند. فقط در موتورهای PMDC که تحریک توسط آهنربا تامین می شود استاتور یا همان میدان به برق نیاز ندارد.
سلام جناب مهندس خسته نباشید در موتور دی سی فرق اینکه استاتور و روتور هر دو به یک منبع برق متصل بشن یا اینکه به منبع برق جداگانه وصل بشن چیه؟ با سپاس
سلام امید جان
تفاوت آن به نوع عملکرد و رفتار موتور بستگی دارد. شما در حالت تحریک مستقل بیشترین درجه آزادی برای کنترل دور و گشتاور موتور را در اختیار دارید در موتور DC رفتار موتور به موتور القایی نزدیک است و در موتور سیری بیشترین گشتاور را در سرعتهای پایین خواهد داشت و پیوسته باید تحت بار راه اندازی شوند نیاز شما نوع اتصال و طراحی موتور را تعیین می کند.
خوب بود