انکودر دوار مرا می برد به سال 87 که بر روی پروژه کارشناسی ارشد خودم که ساخت یک درایو کنترل برداری بود کار می کردم. به سفارش استادم تصمیم گرفتم از انکودر دوار برای خواندن اطلاعات موقعیت روتور استفاده کنم. به پاساژ امجد در جمهوری رفتم و پاساژهای اطراف را هم جستجو کردم اما پیدا نمی شد فروشنده ها اطلاعات فوق العاده اندکی داشتند یک بنده خدایی که مهندس بود و اطلاعاتی خوبی داشت. گفت که اگر انکودر می خواهم به لاله زار بروم و آدرس نمایندگی OMRON و Autonics را به من داد. رفتم و یافتم.
در فروشگاه اول که نمایندگی OMRON بود. شما می توانید تصور کنید گفتم: آقا من انکودر می خواهم گفت: سه سیمه می خواهی یا چهار سیمه. گفتم: فرقش چیه؟ البته نمیدانست. یک نمونه موجود داشت پیش فاکتور گرفتم و زدم بیرون. رفتم پیش نمایندگی Autonics و گفتم: آقا انکودر می خواهم. و منتظر بودم بپرسد سه سیمه یا چهار سیمه که بگویم چهار سیمه که پرسید چند هزار پالس آقا ما سه سیمه چهار سیمه داشتیم پالسی نداشتیم از اون هم پیش فاکتور گرفتم. یعنی اینقدر من داغون بودم.
حالا من قصد داریم هر کدام از اون دو مورد بالا را برای شما تشریح کنم و بگویم چگونه می توانید از انکودر دوار جهت تعیین موقعیت و سرعت استفاده کنید.
انکودر های دوار (Rotary Encoder)
در اتوماسیون صنعتی از انکودرهای دوار به عنوان سنسور زاویه، موقعیت، سرعت و شتاب استفاده می شود. با استفاده از ابزارهایی چون چرخ دنده ها و تسمه نقاله، توسط این انکودرها حرکات خطی را نیز می توان کنترل کرد. انکودرهای دوار عموماً چرخش مکانیکی را به سیگنالی الکتریکی تبدیل می کنند که می توان آن را توسط شمارنده ها، تاکومترها و کنترل کننده های دیجیتالی پردازش نمود
ساختار انکودر های دوار
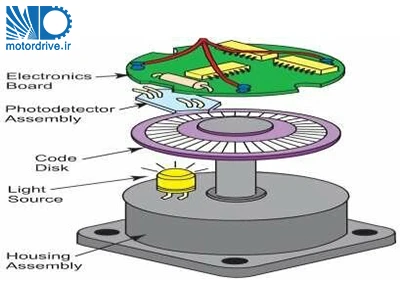
یکی از اجزای اصلی انکودر وار، دیسکی شیشه ای یا پلاستیکی است که به صورت یک در میان با نوارهای شفاف و نوارهای تیره پوشانده شده است. یک منبع نوری در یک سمت و یک حسگر نوری نیز در سمت دیگر دیسک قرار می گیرند.

شکل 1 : ساختار عمومی انکدرهای دوار
همزمان با چرخش شفت و به تبع آن چرخش دیسک، تابش نور به حسگر قطع و وصل می گردد. هرگاه نور به حسگر برخورد می کند، انکودر یک پالس الکتریکی ایجاد می کند. هنگامی که نور توسط بخش تیره دیسک بازتاب شده و به حسگر نمی رسد، سیگنال نیز قطع می گردد. بنابراین با چرخش مداوم دیسک، یک موج مربعی ایجاد می شود (شکل 1).

در اکثر انکودرها از دیودهای نورانی مادون قرمز به عنوان منبع نور و از فتودیودها یا فتورزیستورها به عنوان حسگر نور استفاده می شود. چنانچه عملکرد دیگری به انکودر افزوده نشود، خروجی انکودر فقط یک پالس مربعی است که تنها، نشانگر چرخش دیسک است. لذا از آنجا که جهت چرخش و موقعیت محور با یک موج مربعی قابل تعیین نیست،
بخش های دیگری به انکودر افزوده می شود تا داده های دیگری از چرخش فراهم شود. ساده ترین راه افزودن یک خروجی دیگر با اختلاف فازی معین نسبت به خروجی اول است. به تناسب ساختار داخلی و نیز نوع و تعداد خروجی ها، انکودرهای دوار به دو دسته اصلی تقسیم می شوند؛ انکودرهای دوار افزایشی (Incremental Rotary Encoders) انکودرهای دوار مطلق (Absolute Rotary Encoders)
انکودر دوار افزایشی

این نوع از انکودرها در هر چرخش کامل شفت، تعداد پالس معینی تولید می کنند. با اندازه گیری مدت زمان دوره یک پالس یا شمارش تعداد پالس ها در یک بازه زمانی معین می توان سرعت چرخش را محاسبه نمود. چنانچه یک نقطه ثابت به عنوان مرجع در نظر گرفته شود، تعداد پالس های شمارش شده بعد از آن نقطه را می توان به عنوان پارامتری برای تعیین موقعیت نسبت به نقطه مرجع به کار گرفت.
انکودرهایی با دو خروجی، کنترلر را قادر می سازند تا جهت چرخش را تعیین کند؛ همچنین امکان موقعیت یابی دو ســویه را نیز فراهم میآورند. انکـوـدرهایی که سه خروجی دارند، علاوه بر دو خروجی قبلـی خروجی دیگری دارند که سیگنال صفر نامیده میشود. این خروجی به ازای هر چرخش کامل یک پالس ایجاد میکند. از فرکانس این سیگنال می توان برای محاسبه سرعت زاویه ای(ω) استفاده نمود.
نحوه تعیین جهت چرخش انکودر افزایشی
دو خروجی A و B نسبت به یکدیگر 90 درجه اختلاف فاز دارند تا بدین ترتیب بتوان جهت چرخش را تشخیص داد. برای تعیین جهت چرخش، هر دو فاز مورد ارزیابی قرار می گیرند تا مشخص شود کدامیک بر دیگری تقدم فاز دارد. اگر فاز A بر فاز B تقدم داشته باشد، چرخش ساعتگرد خواهد بود(شکل 2-الف)؛ اما اگر B بر A مقدم باشد، چرخش پاد ساعتگرد است (شکل 2-ب).

شکل شماره 2 – تعیین جهت چرخش با توجه به دو فاز A و B
انکودر دوار مطلق

این انکودر دوار به ازای موقعیت های مختلف روتور،یک کد باینری تولید می کند. این گونه انکودرها، شفت را به تعداد بخش های معینی تقسیم می کنند و به هر بخش یک کد اختصاص میدهند. از لحظه شروع چرخش یک شمارنده داخلی شروع به شمارش می کند و در پایان یک دور کامل، شمارش مجدداً تکرار می شود.
ماکزیمم دقت انکودرهای تک صفحه 13 بیت است؛ یعنی تا 8192 موقعیت برای روتور قابل تعریف است. اما انکودرهای چند صفحه ای دقتی 25 بیتی دارند؛ و این بدان معناست که می توان شفت را به 225 بخش تقسیم کرد. این امر دقت بسیار بالایی را فراهم می آورد. اطلاعات جمع آوری شده نیز به دو صورت سریال و موازی قابل انتقال به کنترلر می باشد و بدین ترتیب دیگر نیازی به ابزار خارجی برای تعیین موقعیت نیست. لازم به ذکر است کدهای اختصاص یافته به شفت به سه صورت است: کد باینری ، کد گری (Gray code) و کد گری افزونی (Gray Excess code) .
علاوه بر انکودر دوار از رزولور هم برای تعیین موقعیت و سرعت الکتروموتور استفاده می شود. ما در وبسایت خودمان دو مقاله با عناویی 1- نحوه کار رزولور چگونه است + ویدئو 2- مقایسه انکودر و رزولور داریم که به تکمیل اطلاعات شما در زمینه فیدبک موقعیت و سرعت کمک می کند.
مراجع؛
- محمدرسول کریمی، “کنترل سرعت موتور القایی با کمک DSP به روش کنترل برداری” پایان نامه کارشناسی ارشد 1389
- Pepperl+Fuchs® Inc., Principles of Rotary Encoders
- OMRON Industrial Automation Co., Incremental Rotary Encoder E6B2-CWZ3E Technical Data, November 2008
بدون دیدگاه