کنترل موتور القایی
موتور القایی پرکاربردترین موتور در بین ماشین های الکتریکی است. قیمت الکتروموتور القایی نسبت به انواع دیگر کمتر بوده و مستحکم هستند و نگهداری آنها نسبت به موتورهای دیگر آسان تر است.
ساختمان موتورهای القایی
موتورهای القایی دارای ساختار استاتوری شبیه به ماشینهای سنکرون میباشند. به لحاظ ساختار روتور، موتورهای القایی را میتوان به دو نوع الکتروموتوربا روتور سیم بندی شده و روتور قفسی یا قفس سنجابی تقسیم بندی کرد. در عمده متنهای علمی نیز بر همین دو نوع کلی تقسیم بندی شده اند. ساختمان کلی آن شامل دو قسمت اصلی روتور و استاتور و یک قسمت نگهدارنده اجزای آن به نام محفظه میباشند. در این زمینه مقاله ” بررسی ساختمان موتورهای القایی سه فاز همراه ویدئو ” را ببینید.

شکل 1: ساختمان موتور القایی سه فاز
موتور القایی چگونه کار می کند؟
در مقاله “موتور القایی چگونه کار می کند؟” به طور مفصل به تشریح نحوه عملکرد موتور القایی پرداخته ایم. همان طور که قبلا اشاره شد موتور القایی دارای دو قسمت اصلی استاتور و روتور می باشد. استاتور بخش ساکن آن است و روتور بخش دوار موتور القایی است. استاتور از پشته کردن تعدادی زیادی ورقه از جنس آهن با نفوذ پذیری مغناطیسی بالا که در یک محفظه چدنی یا آلومینیومی قرار گرفته است تشکیل شده است. سیم پیچها بصورت سه فاز در داخل شیارهای استاتور قرار گرفته اند. مقاله “موتور القایی چیست و چگونه کار می کند؟ + ویدئو ” را ملاحظه کنید.

شکل 2: ورقه های تشکیل دهنده استاتور و استاتور سیم پیچی شده کامل درون فریم
هنگامی که جریان سه فاز از آنها عبور می کند. اتفاق جالبی می افتد. یک میدان مغناطیسی دوار داخل استاتور ایجاد می شود. برای درک بهتر این پدیده بهتر است یک سیم پیچ سه فاز ساده را در نظر بگیرید. فقط سه تا کلاف دارد.

شکل 3: یک سیم پیچ سه فاز ساده فقط با سه کلاف
می دانیم که با عبور جریان در یک سیم اطراف آن میدان مغناطیسی ایجاد می شود. جهت میدان ایجاد شده در اطراف سیم با قانون دست راست یا پیچ راستگرد بدست می آید در صورتیکه شست خود را عمود نگه دارید و انگشت شست جهت عبور جریان را نشان دهد چهار انگشت مشت شده جهت میدان ایجاد شده را نشان می دهند.

شکل 4: میدان مغناطیسی اطراف سیم حامل جریان و تاثیر میدان مغناطیسی بر سیم حامل جریان
ترکیب میدان مغناطیسی حاصل از عبور جریان سه فاز را مشاهده کنیم. در میدان مغناطیسی سه فاز در صورتیکه که جهت میدانها مشابه باشد با هم جمع شده و یک میدان بزرگتر را ایجاد می کنند.

در یک زمان معین با تغییر جهت جریان مطابق با تغییر در ولتاژ AC جهت میدان مغناطیسی تغییر می کند در این چهار لحظه مشخص دیده می شود که میدان مغناطیسی در حال چرخش است. به شکل زیر توجه کنید.

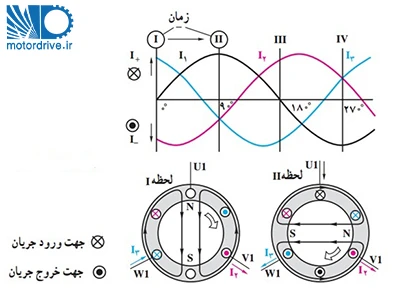
شکل 5: چگونگی تشکیل میدان مغناطیسی دوار در استاتور نشان داده شده است.
ولتاژهای سه فاز که بصورت استاندارد با هم اختلاف فاز 120 درجه دارند در شکل فوق نشان داده شده اند. و استاتور ساده تشریح شده که در هر فاز فقط از یک کلاف تشکیل شده است در پایین آن آورده شده است. بصورت قراردادی در صورتیکه جریان در حال خروج از سیم یا کلاف باشد آن را با علامت نقطه نشان می دهیم و در صورتیکه جهت آن به سمت داخل سیم باشد با ضربدر نشان می دهیم. حال بیایید در زمانهای مختلف جهت میدان مغناطیسی را بدست بیاوریم.
لحظه I: دامنه ولتاژ فاز U (مشکی رنگ) صفر ، ولتاژ فاز V (قرمز رنگ) منفی و ولتاژ فاز W (آبی رنگ) مثبت است. با استفاده از قانوت دست راست یا پیچ راستگرد جهت میدان در هر کدام از کلافها را بدست می آوریم و میدانهای هم جهت را با هم جمع می کنیم تا یک میدان مجموع بدست بیاید. جهت خروج شار از میدان مجموع را با قطب S نشان می دهیم.
لحظهII : در این لحظه دامنه ولتاژ فاز U (مشکی رنگ) مثبت، ولتاژ فاز V (قرمز رنگ) منفی و ولتاژ فاز W (آبی رنگ) منفی است. با استفاده از قانوت دست راست یا پیچ راستگرد جهت میدان در هر کدام از کلافها را بدست می آوریم و میدانهای هم جهت را با هم جمع می کنیم تا یک میدان مجموع بدست بیاید. جهت خروج شار از میان مجموع را با قطب S نشان می دهیم. همان طور که مشاهده می کنید در این لحظه جهت میدان 90 درجه بصورت ساعتگرد نسبت به لحظه I چرخیده است.
در صورتیکه مراحل تشریح شده را برای لحظات III و IV نیز دنبال کنید مشاهده خواهید کرد که جهت میدان تشکیل شده در استاتور بصورت ساعتگرد می چرخد. با فرمول بندی پدیده فوق، روابط زیر را خواهیم داشت.

توجه: سرعت دوران میدان مغناطیسی با عنوان سرعت سنکرون شناخته می شود
در صورتیکه یک حلقه سیم را درون میدان مغناطیسی قرار دهیم. میدان مغنطیسی را حس می کند و مطابق قانون فاراده در آن emf (نیروی محرکه الکتریکی) القا می شود emf القاء شده جریانی را در حلقه بسته برقرار می کند در این حالت مطابق قانون لورنس یک نیرو در حلقه تولید می شود که باعث می شود حلقه بچرخد اما در عمل به جای یک حلقه، یک قفس از تزریق آلومینیوم یا مس در روتور ایجاد می شود که شبیه قفس سنجاب می باشد و از اینرو به این نوع موتور قفس سنجابی هم می گویند.

سرعت چرخش روتور نسبت به سرعت سنکرون کمتر می باشد. در صورتیکه روتور شتاب گرفته و بخواهد سرعت آن با سرعت دوران میدان استاتور نزدیک شود ولتاژ القا شده در آن صفر شده و باعث صفر شدن نیروی وارده به آن و در نتیجه کاهش سرعت آن خواهد شد. کاهش سرعت به میزانی خواهد بود که نیروی تولید شده توسط میله های روتور با نیروی بار موجود بر روی شفت آن برابر شود از اینرو این نوع الکتروموتور بسیار ستبر بوده و در مقابل تغییرات بار مقاوم هستند.
سرعت گردش روتور با استفاده از رابطه زیر بدست می آید.

منظور از تغییر سرعت در الکتروموتور تغییر در سرعت روتور یا همان nr است. با توجه به رابطه فوق برای تغییر در سرعت روتور دو پارامتر سرعت سنکرون (ns) و همچنین درصد لغزش (s) در آن موثر هستند. برای تغییر ns مطابق رابطه ns=60f/p یا باید فرکانس را تغییر داد و یا تعداد قطب را. پس در نهایت و در مجموع برای تغییر سرعت موتور می توان از تغییر سه پارامتر تعداد قطبها(p) فرکانس (f) و درصد لغزش(s) استفاده کرد.
در این مقاله در مورد عمده روش های مرتبط با این سه پارمتر صحبت خواهیم کرد.
1- تغییر سرعت موتور القایی با استفاده از تغییر در تعداد قطبها (P)
در این روش با تغییر در تعداد قطبها سرعت موتور تغییر می کند دو روش استفاده از استاتور با دو سیم پیچ جداگانه و اتصال دالاندر در این گروه قرار می گیرند.
استاتور با دو سیم پیچ جداگانه: در این روش دو سیم پیچ جداگانه مثلا چهار قطب و شش قطب (مانند موتورهای کولر) و یا چهار قطب و 16 قطب (آسانسورهای دو دور ) در استاتور قرار می گیرد و با اتصال برق به هر کدام از آنها دور موتور متناسب با سیم پیچ متصل به آن تغییر می کند در موتورهای کولر دور سنکرون در چهار قطب 1500 دور بر دقیقه و در شش قطب 1000 دور بر دقیقه می باشد.
عیب این نوع کنترل سرعت در این است که سرعت به صورت پیوسته قابل کنترل نیست و فقط دو یا نهایتا سه دور امکان سیم پیچی در استاتور وجود دارد. و دیگر اینکه قسمتی از فضای استاتور توسط سیم پیچی که به برق متصل نیست اشغال می گردد و از فضای استاتور به خوبی استفاده نمی شود و موتور از نظر اندازه بزرگتر از موتور تک دور خواهد بود.
استاتور با سیم پیچی دالاندر: به منظور استفاده بهینه از تمامی فضای استاتور و کلیه سیم پیچهای آن می توان از سیم پیچی دالاندر استفاده کرد. روش کار به این صورت است که مثلا یک موتور با سیم پیچی چهار قطب پیچیده می شود و اتصالات کلافهای آن در بیرون از موتور و توسط سیستم کنترل انجام می شود. با تغییر اتصلات سر سیم کلافهای قطبها موتور را می توان چهار قطب یا دو قطب به کار گرفت. باز هم مشکل عدم امکان دسترسی به دورهای خیلی کم و یا سرعتهای میانی وجود دارد تنها دو سرعت می توان داشت. مشکل دیگر اتصال دالاندر مشکل بودن سر بندی آن و نیاز به چندین کنتاکتور برای راه اندازی آن می باشد.
2- کنترل موتور القایی با استفاده از تغییر در لغزش موتور
در این روش با افزایش لغزش موتور می توان سرعت روتور را نسبت به سرعت سنکرون میدان دوار استاتور کاهش داد. چند روش مختلف برای این کار وجود دارد.
موتور گشتاور (Torque Motor): این روش در کنترل دور موتورهای صنعتی در مقیاس کوچک در گذشته مورد استفاده قرار می گرفته است. روشی بسیار ناکارآمد و پرهزینه می باشد. روش کار بدین صورت است که ولتاژ ورودی الکتروموتور به یک اتوترانس متصل می گردد و با کاهش و افزایش ولتاژ ورودی به الکتروموتور القایی منحنی گشتاور دور موتور بالا و پایین شده و منحنی بار را در نقطه ای متفاوت قطع می کند و در نتیجه دور موتور کنترل می شود.
این روش بسیار ناکارآمد است نیاز به یک اتوترانس و مکانیزمهای گردش آن بصورت دستی دارد. علاوه بر آن، همانطور که می دانیم و می توان اثبات کرد. مقدار تلفات روتور متناسب با مقدار لغزش است یعنی در صورتیکه مثلا مقدار لغزش 80% باشد مقدار تلفات فقط در روتور 80% توان فاصله هوایی است همین موضوع به داغ شدن بیش از اندازه موتور منجر می شود لذا در این موتورها فن جداگانه بزرگی بر روی موتور نصب شده است که فارغ از سرعت موتور بصورت پیوسته موتور را خنک کاری می کند.
استفاده از سیم پیچی تپ: این روش تنوع بسیار زیادی دارد و بسیار ارزان می باشد در عمده موتورهای کوچک که در آن به دورهای مختلف نیاز است استفاده می شود. در موتور شامل: موتورهای هود خانگی، موتورهای فنکوئل، موتورهای کولر پرتابل، موتورهای پرده هوا و پنکه ها مورد استفاده هستند.
روش انجام کار بدین صورت است که با وارد کردن یک سیم پیچی تپ بصورت سری با ترکیب موازی سیم پیچی اصلی و کمکی منحنی گشتاور سرعت موتور را تغییر داده و باعث می شود سرعت آن تغییر کند. سیم پیچی تپ در ترکیبهای مختلفی مورد استفاده قرار می گیرد که در مقاله جداگانه ای مورد بررسی قرار خواهند گرفت. این روش فقط در کاربردهایی که کاربری فن دارند استفاده می شود چونکه گشتاور راه اندازی بسیار کم بوده و قادر به راه اندازی بارهای گشتاور ثابت نیستند.
در این روش نیز تلفات روتور متناسب با درصد لغزش بوده و لذا موتور به میزان قابل توجهی داغ می کند. فن که توسط موتور به گردش در می آید نقش خنک کننده موتور را نیز بر عهده دارد راندمان بسیار کمی داشته و مثلا در دور کند موتور هود راندمان نوعا زیر 5% است و لذا سیم پیچی های تپ فقط در موتورهای کوچک مورد استفاده قرار می گیرند.
یک نمونه از سیم پیچی تپ مربوط به موتور هود شرکت الکتروژن را در شکل زیر مشاهده می کنید.

3- کنترل موتور القایی با استفاده از تغییر در فرکانس تغذیه
این روش کنترل موتور القایی به لحاظ تئوری از سالهای گذشته شناخته شده است اما ابزار مناسب برای پیاده سازی آن وجود نداشت. برای تبدیل ولتاژ AC به DC این کار به راحتی توسط یک پل دیودی امکان پذیر است. اما برای تغییر ولتاژ DCبه AC نیاز به استفاده از شش کلید می باشد که بایستی با استفاده از یک کنترل کننده هوشمند بدرستی کنترل شوند
و برای تبدیل ولتاژ AC با فرکانس 50 هرتز به ولتاژ با فرکانس دیگر نیاز است ولتاژ برق شهر ابتدا توسط یک طبقه پل دیودی DC شود و کار سوئیچینگ سپس بر روی ولتاژ DC صورت پذیرد. این مبنای کار درایو می باشد تا سالهای گذشته انجام این کار پر هزینه و در سالهای دورتر امکان پذیر نبود.
با پیشرفت در حوزه ادوات و سوئیچهای الکترونیک قدرت و با وردی سوئیچهای MOSFET و IGBT این کار امکان پذیر شده است و روش متداول در کنترل سرعت موتورهای القایی در حال حاضر استفاده از اینورتر یا همان درایوهای فرکانس متغیر می باشد درایو فرکانس متغیر و روشهای کنترل آن بطور مفصل پرداخته خواهد شد.
اینورتر چیست و چگونه کار می کند؟
اولین طبقه اینورتر AC، کانورتر (مبدل) است. کانورتر شامل ۶ عدد دیود است که شبیه شیر یک طرفه در سیستم های لوله کشی عمل می کنند. این دیودها اجازه می دهند جریان فقط در یک جهت که با پیکان در نماد دیود مشخص شده است جاری شود. برای مثال، هنگامی که ولتاژ فاز A (ولتاژ، مشابه با فشار در سیستم های لوله کشی است) مثبت تر از ولتاژ فازهای B یا C است آنگاه دیود آن باز شده و جریان برقرار می شود.
هنگامیکه فاز B مثبت تر از فاز A شود سپس دیود فاز B باز خواهد شد و فاز A بسته می شود. این موضوع برای دیودهایی که در بخش منفی باس قرار دارند نیز برقرار و صادق است.در اینصورت، ما با خاموش و روشن شدن هر دیود ۶ پالس جریان را داریم. این روش VFD شش پالس نامیده می شود، که ترکیب استاندارد برای اینورتر جریان است.

برای مثال فرض کنیم که اینورتر در یک سیستم قدرت ۴۸۰V کار می کند. ۴۸۰V ولتاژ موثر (rms) است. پیک ولتاژ در یک سیستم ۴۸۰V مقدار ۶۷۹ ولت است. همان طور که می بینید، باس dc اینورتر دارای یک ولتاژ dc با ریپل AC است. ولتاژ تقریبا بین ۵۸۰V و ۶۸۰V نوسان می کند.

ما می توانیم با اضافه کردن یک خازن بر روی باس DC از ریپل AC خلاص شویم. یک خازن مانند یک مخزن یا انباره در سیستم لوله کشی عمل می کند. این خازن ریپل AC را جذب کرده و یک ولتاژ صاف تحویل می دهد. ریپل AC بر روی باس DC نوعا کمتر از ۳ ولت است. بنابراین، ولتاژ روی باس DC تقریبا ۶۵۰VDC می شود.
ولتاژ حقیقی بستگی به عواملی مانند سطح ولتاژ خط AC تغذیه کننده اینورتر ، سطح عدم تعادل ولتاژ روی سیستم قدرت، بار موتور، امپدانس سیستم قدرت، و هر راکتور یا فیلتر هارمونیکی که بر روی اینورتر قرار گرفته اند. دارد. مبدل پل دیود که ولتاژ AC را به DC تبدیل می کند. بعضی اوقات تنها با عنوان کانورتر شناخته می شود. مبدلی که ولتاژ DC را به ولتاژ AC بر می گرداند نیز یک کانورتر است، اما برای تمایز دادن از مبدل دیودی، با عنوان اینورتر شناخته می شود. در صنایع متداول شده است که هر مبدلی که DC را به AC تبدیل می کند به عنوان اینورتر شناخته می شود.

توجه کنید که در یک VFD واقعی، سوئیچهای نشان داده شده در عمل ترانزیستور هستند. وقتی ما یکی از کلیدهای بالایی اینورتر را می بندیم. فازی از موتور که به آن متصل است به مثبت باس DC متصل می گردد و ولتاژ مثبت روی آن فاز می افتد. و هنگامی که یکی از کلیدهای پایینی را در اینورتر می بندیم. فاز به منفی باس dc متصل شده و ولتاژ آن منفی می شود. بدین سان، ما می توانیم هر فازی را که می خواهیم مثبت یا منفی کنیم و بدین تزتیب فرکانس مورد نظر خود را تولید نماییم. ما می توانیم هر فاز را مثبت، منفی یا صفر کنیم.

موج سینوسی آبی رنگ تنها برای مقایسه نشان داده شده است. اینورتر یا VFD در حالت واقعی این موج سینوسی را تولید نمی کند. توجه کنید که خروجی از VFD یک شکل موج مستطیل شکل است. VFD ها خروجی سینوسی تولید نمی کنند. این شکل موج مربعی انتخاب خوبی برای سیستم توزیع توان نیست، اما برای استفاده در موتور کاملا مناسب است.
اگر ما بخواهیم فرکانس موتور را به ۳۰Hz کاهش دهیم، آنگاه ما به راحتی خروجی اینورتر را خیلی آهسته تر سوئیچ زنی می کنیم. اما، اگر ما فرکانس را به ۳۰Hz کاهش دهیم، آنگاه به منظور ثابت نگه داشتن نسبت V/Hz بایستی ولتاژ را به ۲۴۰V کاهش دهیم. ( به تئوری اینورتر V/F ثابت مراجعه کنید). چگونه ما خواهیم توانست ولتاژ را کاهش دهیم در حالی که تنها ولتاژی که داریم ولتاژ باس ۶۵۰VDC است؟ این کار مدولاسیون پهنای پالس نامیده می شود.

تصور کنید که ما بتوانیم فشار آب مسیر را با باز و بسته کردن بسیار سریع شیر موجود، کنترل کنیم. ذر حالیکه انجام این کار در سیستم های لوله کشی عملی نخواهد بود، به خوبی در مورد VFD ها به کار گرفته می شود. توجه کنید در طی نیم سیکل اول، در نصف زمانهای یک سیکل ولتاژ را در خروجی داریم و در نیم سیکل دیگر ولتاژی نداریم. از اینرو، متوسط ولتاژ خروجی ۲۴۰V، معادل نصف ولتاژ باس تغذیه ۴۸۰V است. با کنترل پالسهای خروجی، می توانیم هر ولتاژ متوسطی که بخواهیم بر روی خروجی VFD ایجاد کنیم.
در اینورترهای موجود در بازار از سه روش مختلف به شرح زیر برای کنترل کنترل موتور القایی استفاده می شود. که هر کدام از این روشها را بررسی خواهیم کرد.
1- روش V/F ثابت
2- روش کنترل برداری (Vector Control)
3- روش کنترل مستقیم گشتاور (Direct torque Control) یا همان DTC
روش V/F ثابت: روش نسبتا ساده ای بوده و به پردازش کمتری نیاز دارد در این روش نسبت ولتاژ بر فرکانس یک عدد ثابتی نگه داشته می شود و به منظور جلوگیری از اشباع مغناطیسی هسته الکتروموتور با کاهش فرکانس ولتاژ نیز کاهش می یابد. و با افزایش فرکانس تا ولتاژ نامی ولتاژ افزایش یافته و پس از آن فقط فرکانس افزایش می یابد. معمولا در درایوهای ارزان قیمت و کوچک استفاده می شود.
روش کنترل برداری: روش پیشرفته تری است که نیاز به پردازش بیشتری دارد در این روش دینامیک موتور القایی نیز کنترل می شود این روش در عمده درایوهای متوسط و بزرگ استفاده می شود در نرم افزار اینورترها (درایوهای فرکانس متغیر) پارامتری وجود دارد که شما می توانید با تنظیم آن پارامتر روش کنترلی درایو خود را انتخاب کنید.
روش کنترل مستقیم گشتاور: نیز روش پیشرفته ای است که نسبت به روش کنترل برداری به پردازش کمتری نیاز دارد و از نظر عملکردی شبیه روش کنترل برداری می باشد.اما ساده تر و ستبر است. این روش را برخی از سازندگان نظیر ABB در درایوهای خود پیاده سازی کرده اند.
خرید الکتروموتور و درایو با بهترین قیمت و کیفیت
برای تهیه انواع درایو فرکانس متغیر و الکتروموتور با بهترین قیمت با ما تماس بگیرید. موسسه موتور درایو نماینده فروش انواع برندهای اینورتر شامل: اینورتر پرتو صنعت، اینورتر آگر، اینورتر پنتاکس، اینورتر اینوت invt، اینورتر اچ پی مونت و بقیه برندهای موجود در بازار می باشد
در زمینه الکتروموتور نیز موتور درایو عامل فروش الکتروموتورهای ایرانی: الکتروموتور موتوژن و الکتروموتور الکتروژن و الکتروموتور گاماک ترکیه و الکتروموتور ایلماز ELK ترکیه می باشد.
ما قصد داشتیم سه روش کنترل موتور القایی را در این مقاله یا مقالات دیگری مورد بررسی قرار دهیم اما روابط و فرمول نویسی و اندیس های فراوانی دارد که نوشتن آن در محیط وب و ویراشگر متنی وبسایت امکان نداشت لذا این روش ها که بخشی از پایان نامه کارشناسی ارشد نگارنده این مطلب (آقای محمدرسول کریمی) است به صورت فایل پی دی اف تهیه شده است و در ادامه پیوست می گردد. این مطلب را از طریق لینک زیر مشاهده بفرمایید.
مرجع؛ محمدرسول کریمی، “کنترل سرعت موتور القایی با کمک DSP به روش کنترل برداری”، پایان نامه کارشناسی ارشد. 1389
2 دیدگاه
بسیار تشکر
سلام حمید جان
باعث دلگرمی ما شدید. متشکرم.