1- ساختار موتور DC بدون جاروبک
موتورهای BLDC اصطلاحا (Brushless DC motor) نوعی از موتورهای سنکرون هستند. این موضوع به این معنی است که میدان مغناطیسی در روتور و استاتور با یک فرکانس ایجاد می شوند. انواع الکتروموتور DC بدون جاروبک دارای لغزش به آن مفهومی که در موتورهای القایی وجود دارد نمیباشند.
موتورهای BLDC در انواع تکفاز، دو فاز و سه فاز وجود دارند. مطابق نوع آن، استاتور دارای همان تعداد سیم پیچ می باشد. علاوه بر این موتورهای سه فاز بیشترین رواج و مصرف را در بین انواع دیگر دارند.که در اینجا به نوع سه فاز میپردازیم.
ویدئوی مقایسه موتور DC بدون جاروبک و موتور DC با جاروبک
در زمینه مزایا و محدودیت های موتور DC بدون جاروبک و موتور DC یک ویدئوی زبان انگلیسی داریم که در موسسه موتور درایو ترجمه و به صورت حرفه ای ویرایش و زیرنویس شده است. (مدت زمان ویدئو سه دقیقه و حجم آن در کیفیت 480P تقریبا 10 مگابایت می باشد) این ویدئوی جذاب را از دست ندهید.
1-1 استاتور
استاتور موتور DC بدون جاروبک از ورقه های فولادی به هم پرچ شده با سیم پیچی که در شیارهای آن قرار گرفته به صورت شکل شماره (۱) ساخته شده است. استاتور همانند استاتور یک موتور القایی است. اما سیمپیچها به روشی متفاوت در استاتور توزیع شدهاند. بیشتر موتورهای BLDC دارای سه سیم پیچ در استاتور با اتصال ستاره هستند. هر کدام از این سیم پیچیها در محیط استاتور توزیع شده اند. و تعداد زوجی از قطبها را تشکیل داده اند.

شکل شماره (۱) : استاتور موتور BLDC
دو نوع مختلف از سیمپیچی استاتور وجود دارد: موتورهای ذوزنقه ای و موتورهای سینوسی. این تفکیک بر اساس اتصالات داخلی پیچکهای یک سیم پیچ که انواع مختلفی از نیروی ضد محرکه ( EMF ) را ایجاد می کنند شکل گرفته است.

همان گونه که از نام آنها دریافت می شود موتور ذوزنقه ای نیروی ضد محرکه مغناطیسی را به فرم ذوزنقه ایجاد می کند. و در موتور سینوسی نیروی ضد محرکه مغناطیسی سینوسی است.همان طور که در شکلهای (۲) و (۳) نشان داده شده است . علاوه بر نیروی ضد محرکه مغناطیسی جریانهای فازها نیز بسته به نوع موتور ذوزنقه ای یا سینوسی می باشند. گشتاور ایجاد شده با موتور سینوسی هموارتر از موتور ذوزنقهای است. البته این موضوع با هزینه و قیمت بیشتر بدست می آید.با توجه به اینکه در موتور سینوسی به علت توزیع شده بودن سیم پیچها اتصالات بین پیچکهای آن بیشتر است از اینرو فضا و مقدارسیم مسی بیشتری مصرف می شود.

1-2 روتور
روتور از مغناطیس دائم ساخته شده است و از دو تا هشت قطب، متغیر است که این قطبها یک در میان قطبهای شمال و جنوب هستند.بر مبنای چگالی شار مورد نیاز در روتور، ماده مغناطیسی مناسب برای ساخت روتور استفاده می شود. مغناطیسهای فریت در گذشته برای ساخت مغناطیس دائم استفاده می شده است.با پیشرفت تکنولوژی، مغناطیسهای آلیاژی کمیاب مقبولیت یافته اند. مغناطیسهای فریت ارزانتر هستند اما اشکال آنها این است که در یک اندازه ثابت دارای چگالی شار کمتری هستند.در مقابل، مواد آلیاژی چگالی مغناطیس بالاتری دارند و این امکان را می دهند که برای ایجاد گشتاوری یکسان، روتور کوچکتری ساخته شود. همچنین، این آلیاژهای مغناطیسی نسبت اندازه به وزن را بهبود داده و در مقایسه با موتوری هم اندازه که با ماده مغناطیسی فریت ساخته شده است گشتاور بالاتری را ایجاد می کنند.
نئودیمیوم( Nd)، ساماریوم کوبالت(SmCo)و آلیاژنئودیمیوم، فریت و برن(NdFeB)تعدادی از این موارد برای آلیاژهای مغناطیسی کمیاب هستند.تحقیقات دائمی درباره بهبود چگالی شار جهت فشردگی بیشتر روتور در جریان است. شکل (۴) مقطع عرضی ترکیبهای متفاوت مغناطیس در روتور را نشان می دهد.

شکل (۴): مقطع عرضی مغناطیس روتور
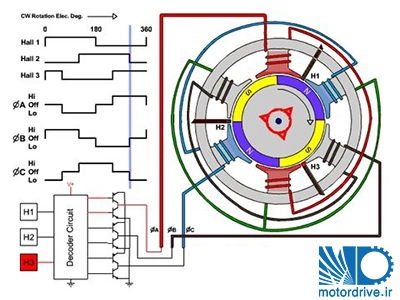
1-3 سنسورهای اثر هال
بر خلاف موتورهای DCمعمولی کموتاسیون موتور DC بدون جاروبک بصورت الکترونیکی کنترل می شود. برای گردش یک موتورBLDC استاتور این موتور بایستی با یک توالی خاص تحریک شود. دانستن موقعیت روتور به منظور اینکه تشخیص دهیم کدام یک از سیم پیچها باید در توالی بعدی تحریک شود بسیار مهم است. موقعیت روتور بوسیله سنسورهای اثر هال قرار گرفته در استاتور تعیین می شود. بیشتر موتورهای BLDC دارای سه عدد سنسور قرارگرفته در استاتور می باشند. هنگامی که پلهای مغناطیسی روتور از نزدیک سنسورهای هال می گذرد آنها یک سیگنال بالا یا پایین می دهند.که نشانگر عبور قطب N یا S از کنار سنسورها است.بر اساس ترکیب سیگنالهای این سه سنسور هال توالی صحیح کموتاسیون تعیین می شود.
شکل (۵) مقطع عرضی یک موتور BLDC با قطبهای متناوب N و S را نشان می دهد. تعبیه سنسورهای هال در استاتور یک پروسه پیچیده است زیرا نامیزان بودن این سنسورهای هال نسبت به مغناطیسهای روتور باعث ایجاد خطا در تشخیص صحیح موقعیت روتور می شود.برای سادهسازی فرآیند نصب سنسورهای هال در استاتور، برخی از موتورها ممکن است مگنتهای سنسور هال بر روی روتور را علاوه بر مگنتهای اصلی داشته باشند.اینها نسخه المثنی کوچک شدهای از روتور هستند.از اینرو، هنگامی که روتور میگردد ، مگنتهای سنسور هال همان اثری را ایجاد میکنند که مگنتهای اصلی ایجاد میکنند. سنسورهای هال معمولا بر روی یک برد PC نصب شدهاند. و بر روی کلاهک محفظه انتهایی غیر گردان ثابت شدهاند.این موضوع کاربر را قادر میسازد برای بدست آوردن بهترین عملکرد کل مونتاژ آنها را تنظیم کند.

1-4 تئوری عملکرد
هر توالی کموتاسیون یکی از سیم پیچها را بصورت مثبت تحریک کرده(جریان به سیم پیچ وارد می شود) دیگری را منفی تحریک کرده (جریان از سیم پیچ خارج می گردد) و سومی را تحریک نمیکند. گشتاور از بر همکنش میدان مغناطیسی تولید شده توسط پیچک های استاتور و مغناطیس دائمی روتور ایجاد می گردد. در حالت ایدهآل گشتاور حداکثر در هنگامی که این دو میدان در زاویه ۹۰ درجه نسبت به یکدیگر قرار دارند رخ می دهد و با کم شدن این زاویه گشتاور نیز کاهش می یابد. بمنظور اینکه موتور به کار خود ادامه دهد میدان مغناطیسی تولید شده توسط سیمپیچها بایستی به نسبت حرکت روتور تغییر موقعیت دهند تا همدیگر را بگیرند. این مساله همان چیزی است که تحت عنوان کموتاسیون ۶ مرحله ای که چگونگی تحریک سیم پیچها را تعیین می کند شناخته می شود.
۲– مزایا و معایب استفاده از موتور DC بدون جارویک یا BLDC
اولین چالشی که در انتخاب موتورهای الکتریکی وجود دارد چرایی این انتخاب، مزایا ، معایب و سربه سر کردن این موارد و در نهایت تحلیل اینکه کدام یک از گزینه ها برای یک کاربرد خاص مفیدتر و به صرفه تر است، می باشد. از اینرو در اینجا این تحلیل برای موتورهای BLDC ارائه می گردد تا دید روشنتری نسبت به این موضوع بدست بیاوریم. این مساله در دو جدول مزایا و معایب این موتورها طبقه بندی و تحلیل شده است.
2-1 مزیتهای موتور BLDC و دلایل وجود این مزیتها


2-2 معایب
اولین اشکال موتورهای BLDC قیمت آنها است. البته این مساله به دلیل ذات ساختاری خود موتور نبوده است زیرا موتور BLDC در حقیقت ساده تر از موتور DC با جاروبک است. این قیمت بیشتر برای موتورهای BLDC در اغلب مواقع به علت نیاز به درایو الکترونیکی برای این موتورها می باشد. برای کاربردهای تک سرعت، احتمال دارد این هزینه افزایش قیمت با وجود مزیتهای دیگر این موتور توجیه پذیر نباشد. در حالی که اگر نیاز به سرعت متغیر و یا کنترل موقعیت داشته باشیم که در هر صورت نیازمند مدارات الکترونیک هستیم آن گاه موتورهای BLDC علاوه بر اینکه مزیتهای فوق را دارند چندان هم گران محسوب نمی شوند. موارد متعدد استفاده از دیسک درایو تا ماشینهای ابزار همه به تکنولوژی BLDC تغییر یافته اند.
مراجع
[۱] PadmarjaYedamale , “Brushless DC (BLDC) Motor Fundemantals”, MICROCHIP, AN885. Year 2003
[۲] Mohammad Mubeen , “Brushless DC Motor Primer” , Last Revision ,july 2008
20 دیدگاه ها
آقا خسته نباشید
متن مقاله در خصوص موتورهای bldcخیلی جالب بود.مفهوم جاروبک را نفهمیدم اگر امکان دارد .از طریق تلگرام اطلاعات بیشتری ارسال فرمایید. بنده سازنده مجتمع های اداری و تجاری هستم و از همکاری با شما خوشحال خواهم شد.
با شما تلفنی صحبت کردم. خوشحالم که مورد توجه شما قرار گرفته است.
ممنون از اشتراک گذاری مطالب بسیار خوبتون
متشکر
مطالب خوب و جالب بودند.سپاس از شما
ممنون. عالی بود، لطفتون مستدام
سلام ممنون از مطالب مفيدتون من ميخوام يه موتور ماشين لباسشويي bldc رو جدا از مدار ماشين لباسشويي روشن كنم مقدوره؟؟
سلام آقای سالاری
ممنونم از لطفی که دارید. برای استفاده از موتور BLDC شما باید درایو آن را هم داشتخ باشید. در برخی از دستگاهها سازنده مدار اینورتر و کنترل کننده را بر روی یک بورد قرار داده است در این حالت به هیچ وجه نمی توان موتور را خارج از دستگاه به کار گرفت.
با سلام من نیاز به یک موتور براشلس دارم برای دور 100000 برای کار نساجی در صورت امکان شماره تلفن بدهید تماس بگیرم.
با شما صحبت کردیم بحث و ادامه کار را بصورت تلفنی پیگیری می کنیم.
شفت موتور ما الزاما 8 میلی متر هست بلبرینگهای دو سر موتور سرامیکی هستند الزاما در صورت امکان میخواهیم از پی ال سی دستور بگیرد ما PWM را از پی ال سی بگیریم برامون راحتر هست (ال جی ) محور موتور را از استیل نگیر گرفتیم تا تاثیری در اهنرباها نداشته باشد استاتور از جنس فریت هست با قطر 10 میل و یا میتوانیم از دوتا فریت کنار هم یا سه تا کنار هم استفاده کنیم تا ارتفاع روتور افزایش یابد(پیشنهاد ما هست فریت شما نظر دیگری داشته باشید انرا انجام میدیم) انتخاب ما به دلیل فرکانس بالا هست پسماند نداشته باشد اهنرباهای روی روتور قطر 6 میل هستند با طول 10 میل که میتوانیم روی روتور 4 تا کنار هم قرار بدهیم ترجیحا از ولتاژ 220 دی سی استفاده کنیم بدنه موتور را الومینیوم داریم یک فکری هم برای خنک شدنش میکنیم سیم پیچها در خارج از بدنه هستند و امکان هر گونه تغییرات در انها وجود دارد هم به لحاظ ابعاد هم به لحاظ ….
سلام جناب رجبی
ان شاءالله در جلسه ای موارد مورد نظر جنابعالی بررسی و به جمع بندی خواهیم رسید.
دکتر رجبی فام سال ۹۹ فوت کردند. یادشون گرامی
یادشون گرامی. خدا رحمت شان کند
سلام. آیا در شهر تهران فروشگاهی وجود دارد که موتور BLDC با توان خروجی حدود 1KW برای فروش عرضه کند؟
سلام آقای شعبان گل
موتورهای BLDC هنوز خیلی متداول نشده اند من در نمایشگاه صنعت شرکتی را دیدم که موتورهای BLDC در کاتالوگش موجود بود اما وقتی که قصد خرید کردیم. متوجه شدیم که سفارشی وارد می کند. من شرکتی را نمی شناسم که این موتورها را موجود داشته باشد.