در قسمت اول این نوشته در مورد ساختمان الکتروموتورهای DC ، اصول کار، روابط نیرو و گشتاور، حفاظت و راه اندازی این موتورها صحبت کردیم در قسمت دوم درباره تغییر جهت دوران، پدیده کموتاسیون و کنترل سرعت موتورهای DC مطالبی ارائه گردید.
قسمت سوم و پایانی این مبحث در این پست ارائه شده است. موتورهای DC انواع مختلفی دارند که از لحاظ کاربرد و مشخصه با همدیگر متفاوت هستند. موتورهای انیورسال با هر دو ولتاژ AC و DC کار می کنند اما ساختار آنها شباهتا بسیار زیادی با موتورهای DC دارد در انتهای این مقاله در مورد این موتورها نیز صحبت خواهیم کرد.
انواع موتورهای DC
موتورهاي DC را می توان به دو دسته کلی تقسيم بندی نمود.
الف: تحريک مستقل
ب: خود تحريک شامل
۱- تحريک شنت ۲- تحريک سري ۳- کمپوند اضافي ۴- کمپوند نقصاني
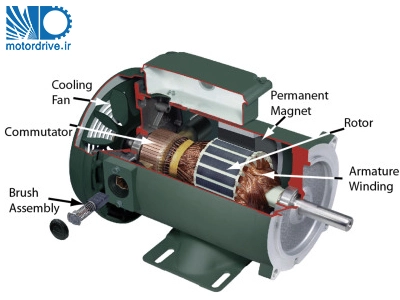
موتورهای مغناطیس دائم را شاید بتوان در رده موتورهای تحریک مستقل قرار داد در این موتورها یک مغناطیس دائمی عمل تحریک را انجام می دهد.
موتور تحريک مستقل
مدار معادل و مشخصه خارجی موتور تحریک مستقل در شکل زیر آورده شده است.

مدار معادل مدل مداری موتور الکتریکی DC بوده و کمک می کند تا با استفاده از قوانین ساده کیرشهف و قانون اهم مدار و رفتار الکتروموتور را تحلیل کرد. روابط اصلی در زیر شماتیک نوشته شده است. منحنی مشخصه خارجی موتور DC : مشخصه تغییرات سرعت بر حسب تغییرات گشتاور است. و بیانگیر این موضوع است که سرعت الکتروموتور با تغییر (افزایش یا کاهش ) بار روی آن چگونه تغییر می کند. این مشخصه در تحلیل رفتار ماشین و انتخاب موتور مناسب برای کاربرد مورد نظر بسیار مهم است.

موتور خود تحريک شنت
مدار معادل و مشخصه خارجی موتور تحریک مستقل در شکل زیر آورده شده است.

با توجه به اشکال فوق ملاحظه می شود که مشخصه خارجی موتور تحریک مستقل و موتور خودتحریک شنت کاملا مشابه و یکسان هستند. از اینرو در دسته بندی موتورهای DC این دو را در یک دسته قرار می دهند؟ شاخه موازی مدار شنت در خودتحریک شنت به منبع تغذیه متصل است و مانند تحریک مستقل عمل می کند. افت دور کم با افزایش گشتاور بار مشخصه بارز این نوع موتورها است که رفتاری شبیه به موتورهای القایی از خود نشان می دهند.
کنترل سرعت موتور شنت
الف- تنظیم مقاومت تحریک و از این طریق کنترل شار میدان
ب- تنظیم ولتاژ ترمینال اعمال شده به آرمیچر
الف- تنظیم مقاومت تحریک و از این طریق کنترل شار میدان
۱- افزایش مقاومت میدان RF جریان تحریک را کاهش می دهد (IF = VT/RF)
۲- کاهش جریان جریان تحریک IF شار میدان φ را کاهش می دهد.
۳- کاهش شار، ولتاژ نیروی محرکه داخلی تولید شده را کاهش می دهد. (EA = Kφω)
۴- کاهش EA جریان آرمیچر را افزایش می دهد. (IA = (VT – EA)/RA)
۵- تغییرات در جریان آرمیچر بر تغییر شار غالب است از اینرو ، افزایش IA گشتاور ایجاد شده را افزایش می دهد.
۶- گشتاور ایجاد شده افزایش یافته و در حال حاضر بزرگتر از گشتاور بار است ، بنابراین ، سرعت ω افزایش می یابد.
۷- افزایش سرعت نیروی محرکه داخلی تولید شده ماشین EA را افزایش می دهد.
۸- افزایش EA جریان آرمیچر IA را کاهش می دهد.
۹- کاهش IA گشتاور تولیدی را کاهش داده به نوعی که در یک سرعت بالاتر Tind = Tload شود. تاثیر افزایش دادن مقاومت میدان در حدود یک بار نرمال: از بی باری تا بار کامل افزایش در مقاومت میدان سرعت موتور را افزایش می دهد. مشاهده می شود که شیب منحنی گشتاور- سرعت با افزایش مقاومت تحریک بیشتر می شود. در یک رنج وسیعتر منحنی احتمال دارد بصورت زیر درآید.

ب- تنظیم ولتاژ ترمینال اعمال شده به آرمیچر
شکل زیر چگونگی کنترل ولتاژ آرمیچر و منحنی های گشتاور سرعت با تغییر ولتاژ برای این روش آورده شده اند. ملاحظه می شود که در این روش شیب خط تغییرات سرعت بر اساس گشتاور بار تغییر نمی کند و فقط به سمت بالا و پایین شیفت پیدا می کند. و از این نظر مطلوب تر از روش قبلی است.

موتور خود تحريک سری
مدار معادل و مشخصه خارجی موتور خود تحریک سری در شکل زیر آورده شده است.

با توجه به منحنی خارجی موتور سری مشخص است که این موتور در بارهای کم سرعت زیادی دارد و در سرعت کم یا لحظه راه اندازی گشتاور قابل توجهی تولید می کند و مناسب بارهایی است که گشتاور راه اندازی و کار زیادی نیاز دارند مانند بالابرها آسانسورها و کانوایرها اما هرگز نباید بی بار کار کند. چونکه در این صورت به سرعت خطرناک می رسد.
موتور خود تحريک کمپوند
این نوع از موتورها بسته به نحوه اتصال شاخه موازی سیم پیچ تحریک به دو دسته کمپوند با اتصال شنت بلند و کمپوند با اتصال شنت کوتاه تقسیم می شوند. مشخصه خارجی این موتورها مابین موتور شنت و سری قرار دارد.

موتور کمپوند با اتصال شنت بلند / موتور کمپوند با اتصال شنت کوتاه
موتور DC مغناطيس دائم(PMDC)
موتوري است که استاتور آن از مواد مغناطيس دائم ساخته شده است.
مزايا
- به علت عدم نياز به مدار ميدان خارجي، هيچ گونه تلفات مسي در ميدان مغناطيسي وجود ندارد.
- به علت عدم نياز به سيم پيچ ميدان، اين موتور مي تواند به ميزان قابل توجهي کوچکتر باشد.
معايب
- چون که مغناطيس دائمي چگالي شار ضعيف تری از يک موتور تحريک خارجي شنت توليد مي کند از اينرو اين موتور گشتاور کمتري را فراهم مي کند.
- خطر مغناطيس زدايي در اثر قرارگیری در دماهاي زياد يا عکس العمل عرضي آرميچر (mmf آرميچر ) وجود دارد.

مغناطیس دائمی موتور DC
براي هسته موتورهاي معمولي عموما از يک ماده فرومغناطيس با چگالي پسماند مغناطيسي کوچک استفاده مي کنند. در حالي وضعيت مطلوب براي موتورهاي PMDC وضعيت مطلوب استفاده از مواد مغناطيسي با چگالي پسماند مغناطيسي هر چه بزرگتر در قطبهاي مغاطيسي آنها مي باشد.
منحنی مغناطیس شوندگی و چگالی شار مواد مغناطیسی
يک مقايسه کلي از منحني هاي مواد مغناطيس دائم که جديدا توسعه اند با مواد مغناطيس دائم متداول آلياژي (آلينکو ۵) نشان ميدهد که مغناطيس ساخته شده از چنين موادي پس ماند مغناطيسي در حد بهترين هسته هاي ساخته شده از مواد فرومغناطيسي توليد مي کنند. طراحي موتور مغناطيس دائم کاملا شبيه به طراحي موتورهاي شنت يا تحريک مستقل ميباشد البته با اين تفاوت که در PMDC شار موتور ثابت است. در نتيجه تنها راه ممکن براي کنترل سرعت موتورهاي PMDC کنترل ولتاژ آرميچر است.

موتورهاي اونيورسال
عمده موتورها از منبع تغذيه DC يا AC تغذيه مي کنند و بعضي ديگر از هر دوي اين منابع تغذيه می کنند، اين نوع موتورها را موتورهای اونيورسال می گويند.
از لحاظ ساختاری بسيار شبيه به موتورهاي خود تحريک سری می باشند، اما برای کارکرد با هر دو نوع منبع تغذيه DC و AC طراحی شده اند.
ویژگی ها
- اصولا سرعت بالايي دارند ( معمولا بيش از ۱۰۰۰۰ دور بر دقيقه)
- نسبت قدرت به وزن بالايي را ارائه مي دهند.
- براي تجهيزات قابل حمل مثل دريل های دستي و جاروبرقی ها بسيار مناسب می باشند.

29 دیدگاه
باسلام وخسته نباشید ، ممنون از راهنمایی وسایت خوبتون … ممنون میشم کمکم کنید. من دانشجوی کاردانی رشته برق صنعتی هستم ، میخواستم ازتون درخواست کنم به صورت ساده وجامع درمورد پدیده مهار گسستگی وعلت اصلی ایجاد آن واتفاقات مربوط به آن توضیح دهید.(چه اتفاقی درموتور می افتد؟)… باتشکر
سلام سجاد جان
من پدیده مهار گسستگی تا حالا به گوشم نخورده است. اگر منظور شما زیاد شدن و از کنترل خارج شدن دور موتور شنت به واسطه قطع تحریک است. آن را می شود توضیح داد در کتاب ماشینهای الکتریکی چاپمن هم به خوبی توضیح داده است. ویرایشگر متنی ما محدودیت دارد و نمی توانیم فرمول تایپ کنم. کلا به فضای زیادی نیاز دارد اگر دوست داشتی تماس بگیر تا در این مورد صحبت کنیم.
سلام خسته نباشید ممنون بابت اطلاعات مفیدتون.من تا قسمت سوم مطالعه کردم.پروژه ی ارشد برای درس تیوری جامع ماشین موتور های dc سری برای من در نظر گرفته شده مکنه راهنماییم کنید ک از چ راهی چ مقادیری برای مدلسازی در متلب نیاز هست و باید استفاده کنم؟از لطفتون سپاسگزارم
سلام خانم رضوانی
در پست قبلی کتاب تحلیل ماشینهای الکتریکی پال سی کراوز انتشارات دانشگاه صنعتی اصفهان را معرفی کرده ام. می توانید تهیه کرده و بهره ببرید.
سلام براي خريد يك موتور DC كه ولتاژ آن بالاتر از ولتاژ خروجي درايو مي باشد چه اشكالاتي به وجود مي اورد.مثلا موتور با ولتاژ 520 و خروجي درايو حداكثر 420 مي باشد. آيا باعث معيوب شدن درايو خواهد شد.ممنون
سلام آقای اکبری
اگر ولتاژ درایو کمتر از ولتاژ نامی موتور باشد. موتور در مد کنترل سرعت از طریق ولتاژ کار می کند بسته به نوع موتور رفتارهای متفاوت بروز خواهد داد. توان نامی تامین نخواهد شد و احتمال دارد موتور نتواند بار را به گردش در بیاورد. و کلا مساله دینامیکی است. و مقدار پیچیدگی دارد.
سلام من دارم روی پروژه کارشناسیم کار میکنم که کنترل دور موتور دی سی تکفاز بهمراه ساخت درایوش هست. بنظر شما از کدوم یک ازین موتور ها استفاده کنم بهتره؟
سلام خانم احمدی
اگر دارید کار کنترل موتور DC را انجام می دهید معمولا بایستی بر روی موتور تحریک مستقل کار کنید. چون درجه آزادی کنترل ولتاژ آرمیچر و جریان تحریک در اختیار شما قرار می گیرد.
سلام به مدیر سایت ببخشید من یه سوال داشتم از یه موتور dc میخوام استفاده کنم واسه چرخوندن دو تا دینام 24 ولت 320 امپر …شما چه موتور dcپیشنهاد میکنید؟؟؟.من اولین باره که تو سایت دارم مینویسم نمیدونم جوابش چیجوری میاد .اگه میتونید تو تلگرام به ایدی @sameh120 پیام بدید …ممنون
اطلاعاتی که دادید برای پاسخگویی کافی نیست. دینام اصولا برق DC تولید می کند شما قصد دارید موتور dc استفاده کنید که برق dc استفاده کند در دو ماشین جداگانه تلفات داشته باشید و دوباره برق dc تولید کنید؟ منطقی به نظر نمی رسد.
با عرض سلام و خسته نباشید خدمت شما بنده دو تا سوال از شما داشتم 1:این که کدام موتوری هست که ارمیچر ان استاتورش باشد ؟و سوال دوم نقشه سیم پیچی یا شکل استاتور یک ماشین 4قطب از نوع کمپوند کوتاه میخواستم با تشکر بسیار فراوان از شما
سلام آقای اکبری
در مورد سوال اول در موتورهای دی سی بدلیل نیاز به کموتاسیون تحریک پیوسته در استاتور قرار دارد. اما در موتورهایی مثل موتور سنکرون یا آلترناتورها که ژنراتورهای اصلی تولید برق هستند خلاف این است. یعنی تحریک در روتور قرار دارد.
اما در مورد سوال دوم شما دو تا چیز را با هم مخلوط کرده اید. سیم پیچی موتور DC و دیگری نحوه اتصال سیم پیچهای تحریک و ساختن کمپوند کوتاه. اولی را باید به کتابهای سیم پیچی مراجعه کنید چون خیلی مفصل است. اما در مورد دومی
دیاگرامهای فوق اتصالات کمپوند با شنت کوتاه و بلند را نشان می دهند. موفق باشید.
با سلام، با عرض خسته نباشید. یک سوال در مورد موتور کمپوند داشتم!!! آیا میتوان سیم پیچی های تحریک سری و شنت را به جای یکدیگر استفاده کرد؟ چرا؟
سلام طه جان
اگر یک نمونه موتور DC را از نزدیک ببینید جواب سوال خود را به وضوح می توانید ببینید. سیم پیچ تحریک سری با مدار آرمیچر به صورت سری قرار می گیرد و جریان زیادی از آن عبور می کند لذا باید قطر سیم آن زیاد باشد و چون جریان زیادی عبور می دهد نیاز به تعداد دور کمی دارد. اما سیم پیچی تحریک شنت مستقیما به ولتاژ ترمینال متصل است تعداد دور زیاد و قطر سیم کمی دارد. لذا این دو را نمی توان به جای یکدیگر استفاده کرد. یک موتور DC پیدا کنید و از نزدیک بررسی کنید.
مقاله ی جالبی بود. ممنون می شم اگه در مورد درایو این نوع موتور هم از شما مقاله ببینم.
میر علی عزیز
خیلی ممنون از محبتی که به من دارید. قطعا در این زمینه هم خواهم نوشت. از آنجاییکه همه مطالب این سایت تجربیات خودم در کار و یا ترجمه مقالات فنی مناسب است معمولا ایجاد محتوایی اینچنین زمان بر است. امیدوارم بتوانم به خواست شما پاسخ مناسب بدهم.
از حسن نیت شما کمال تشکر را دارم.بنده نیز از همکاران شما میباشم.در زمینه تابلوهای برق قدرت.
دوست عزیز ممنون از لطف شما. هدف من ایجاد محتوا بوده است. خوشحالم که توانسته ام به مقدار هر چند جزیی گامی در این جهت بردارم.
ممنون از متن گویا و جامع شما.
دیدگاههای تازهتر »